Insights
Object detection is one of the most important tasks of computer vision and as such has received considerable attention from the research community. Typically object detectors identify one or more bounding boxes in the image containing an object and associate a category label to it. These detectors are specific for each class of objects, and for certain domains exist a vast literature of specialized methods, such as face detection and pedestrian detection.
In recent years the objectness measure, that quantifies how likely an image window is containing an object of any class, has become popular. The popularity of objectness proposal methods lies in the fact that they can be used as a pre-processing step for object detection to speed up specific object detectors.
The idea is to determine a subset of all possible windows in an image with a high probability of containing an object, and feed them to specific object detectors. Object proposals algorithms perform two main operations: generate a set of bounding boxes and assign an objectness score to each box.
The window proposal step is typically much faster than the exhaustive evaluation of the object detector. Considering that a “sliding window” detector has typically to evaluate 106 windows, if it is possible to reduce this number to 1000-10000, evaluating only these proposals, then the overall speed is greatly improved. In this sense objectness proposal methods can be related to cascade methods which perform a preliminary fast, although inaccurate, classification to discard the vast majority of unpromising proposals. Reducing the search space of object bounding boxes has also the advantage of reducing the false positive rate of the object detector.
The great majority of methods for objectness proposal have dealt with images, while approaches to video objectness proposal are oriented toward segmentation in supervoxels , deriving objectness measures from the “tubes” of superpixels that form them. This process is often computationally expensive and requires to process the whole video.
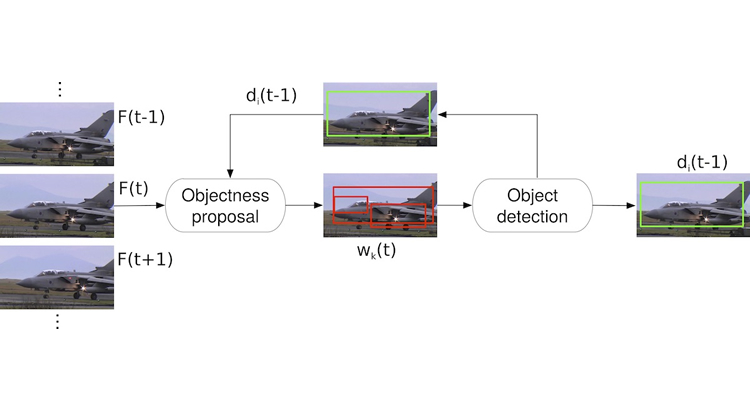
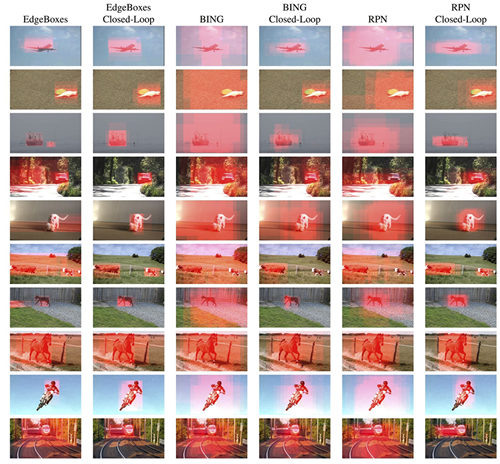
In our work we propose a novel and computationally efficient spatio-temporal objectness estimation method, that takes advantage of the temporal coherence of videos. This method exploits the sequential nature of videos to improve the quality of proposals based on the available information on previous frames determined by detector outputs. We define this approach as closed-loop proposals, since we exploit not only the current frame visual feature but also the proposals evaluated on a previous frame. Integrating the output of objectness proposals with object detection, we obtain a higher detection rate when computing spatio-temporal objectness in videos and we also improve the detection running time.
We point out that our approach is different from tracking and is not based on any form of it. Object tracking, especially in the multi-target setting, is usually addressed using object detectors and some data association strategy that can be either causal and non-causal. In the proposed approach we exploit the temporal coherence of sequences causally, but we do not estimate motion of objects, either implicitly or explicitly. Moreover, our end goal differs from the one of tracking, that is to precisely locate an object instance in order to keep its identity correct as long as possible. Our goal is to enhance the quality of object proposals so to improve both detection quality and speed.
We obtain 3 to 4 points of improvement in mAP and a detection time that is lower than Faster R-CNN, which is the fastest CNN based generic object detector known at the moment.
