
The goal of this project is to build a system for image registration and 3D reconstruction. We developed a C# API to generate high resolution images from images of frescoes or paintings acquired with a robotic arm moving on a plane with high precision. The typical workflow that our system supports is:
- acquisition of a reference image,
- acquisition of detail images,
- image mosaic generation from the detail images,
- 3D reconstruction of the acquired surface.
We used SIFT descriptors for keypoint detection and correspondences. The system also allows the user to hand specify points in correspondence. The system supports homographies and nonlinear transformations based on local affinities.
We designed a calibration procedure to estimate at the same time the internal camera parameters and the robot camera poses.
Images are saved as a final high resolution blend and as an intermediate multi-layer format (PSD) that allows further editing.
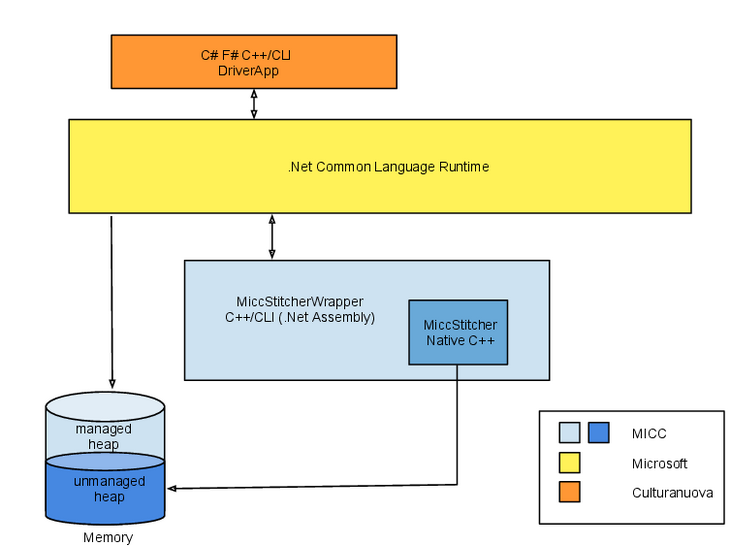
Involved Technologies: C++\CLI ,C#, OpenCV, Boost library, Visual Studio, MATLAB, enblend.
Customer: Culturanuova s.r.l.
Authors:
- Iacopo Masi (2D image stitching)
- Lorenzo Seidenari (2D image stitching)
- Federico Pernici (3D reconstruction)
Year: 2013
